- Loading…

Hacking machines to either improve, or change the original purpose of the machine can be rewarding and gives the user control over their machine as well as what they can do with it.
PancakeBot 1.0 has a large surface printing area, and some times, you may want to increase your output.
The best way to do this is to add an additional bottle.
With this lesson you will learn and accomplish the following:
SAFETY FIRST
When operating the PancakeBot, there are few precautions one must take.
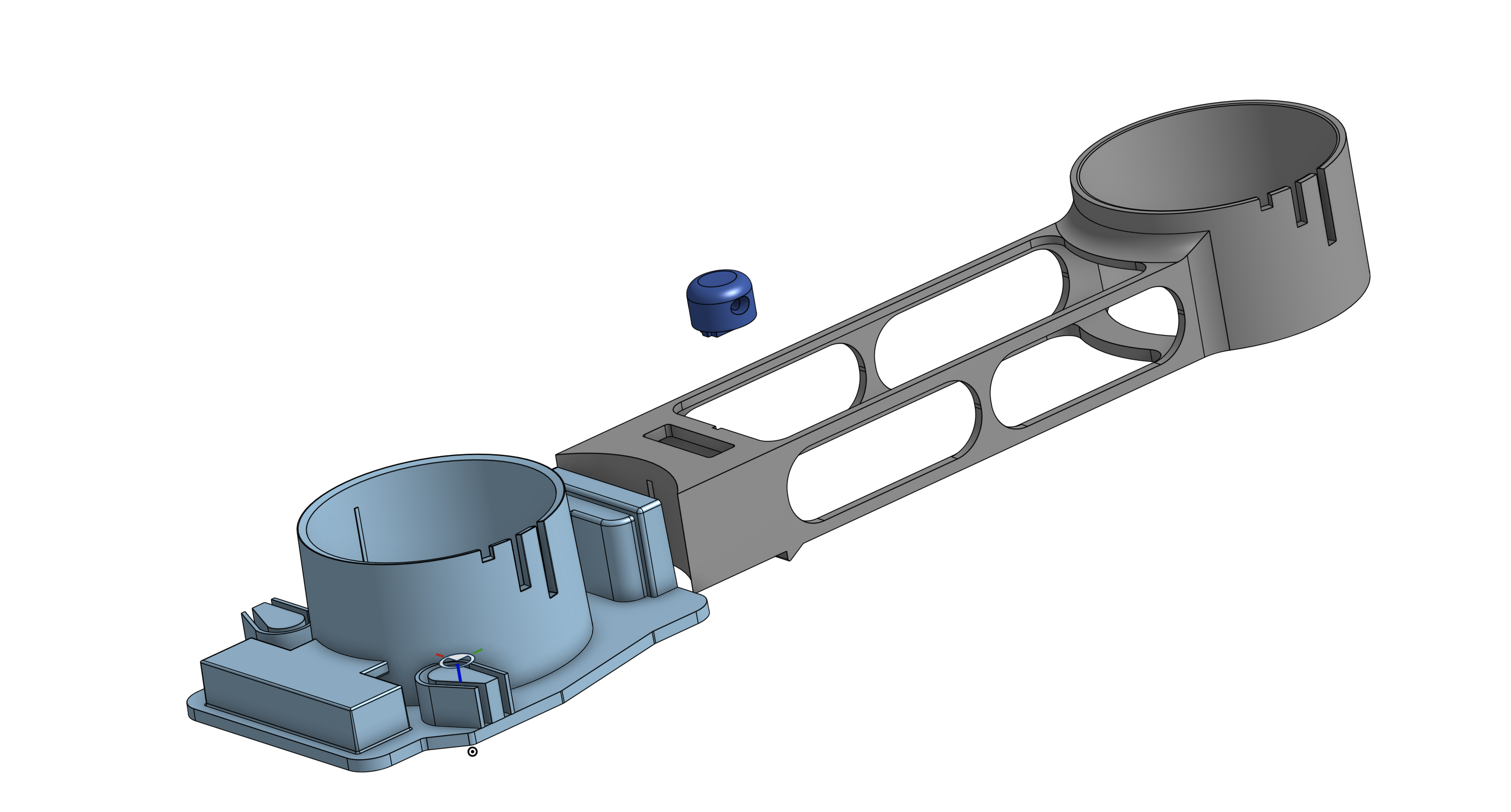
While there are many ways to solve a problem, studying other attempted solutions can give you an insight to what others have tried, what works, and what doesn't work. In this step you will look at two different designs for the extension arm initially proposed by the inventor of PancakeBot.


When looking at these designs, take into consideration the following points.
Here you will print out two original design proposals by the inventor of the PancakeBot.
The onboard pneumatic system for the PancakeBot has one outlet which switches back and forth between positive and negative (vacuum) pressure. It emulates a ketchup bottle. When you squeeze the bottle, it builds up pressure and pushes the batter out. When you let go of the bottle, the plastic qualities of the bottle act as a spring and return the bottle to its original shape, this in turn creates a vacuum in the bottle. In order to dispense to two bottles, we need to split the flow of the air into two, thereby controlling two bottles simulateniously. The air can be split with a pneumatic Tee or a Y but if you cannot access one, printing your own can be a solution. Here we'll look at the design for a pneumatic three-way connector and discuss the design considerations and how your printer tolerances will affect performance. Then you will print the connector and test.

Figure 1: Technical drawings of the pneumatic Y fitting.
The pneumatic Y allows to split the flow of air from the PancakeBot Gantry to two different bottles. This then allows you to draw two pancakes simultaneously.
Study the drawing before printing. Using your vermier calipers, measure the dimensions of the hose on the PancakeBot Gantry. How big is the hose compared to the insert holes in the pneumatic Y?
Engineering Tolerances
Engineering Tolerances are dimensions where the dimensions during fabrication may vary slightly. This can be due to a variety of issues when it comes to 3D printing that would change the desired dimension of the print.
Things to Consider
Having trouble? Let us know by completing the form below. We'll do our best to get your issues resolved quickly.
"*" indicates required fields
